Built a 3D printed car robot and programmed it to drive autonomously.
ROS 2SLAMC++PythonSensor FusionPID ControlIsaac Sim
Used the Soft Actor-Critic algorithm to teach a quadruped robot to walk in simulation.
PythonPyTorchDeep Reinforcement Learning
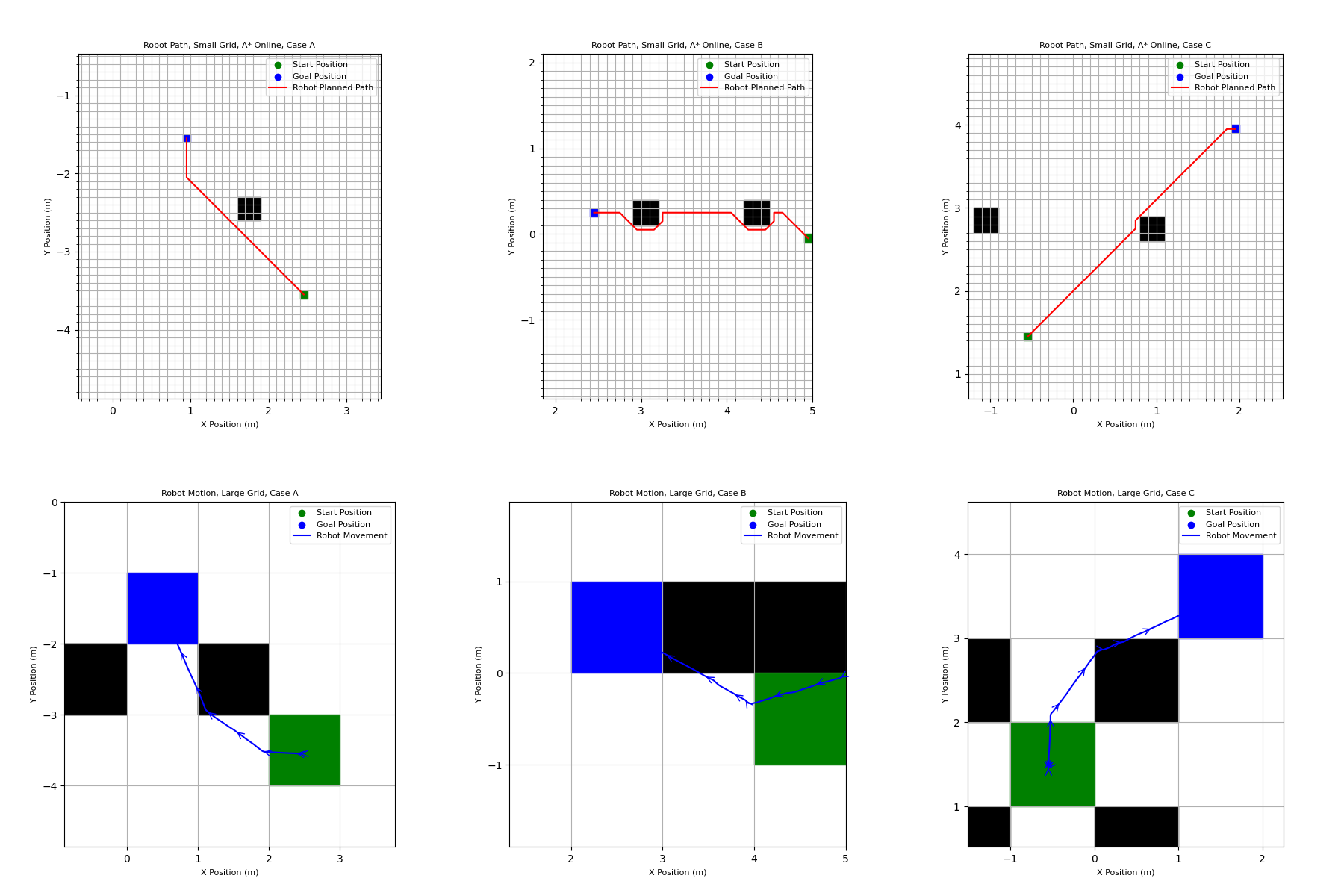
Used the A* algorithm to plan paths for a simulated robot.
AIPythonAutonomous NavigationA*Path Planning
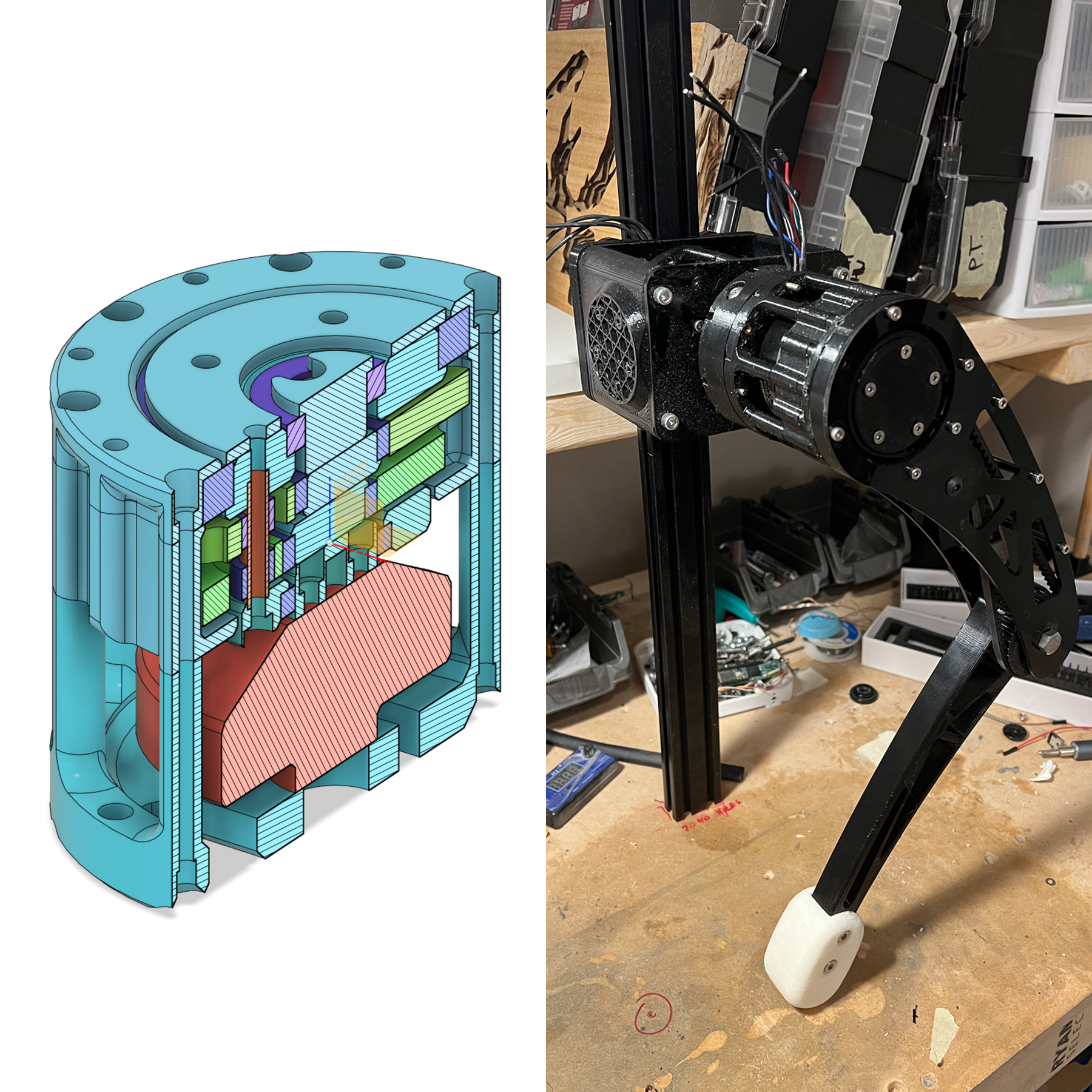
Designed and tested a 3D printed cycloidal actuator for use in walking robots.
3D PrintingCADMechanical DesignPCB Design
Programmed a robot arm to detect and grab a pen using computer vision.
PythonOpenCVRobot Kinematics
Created ROS 2 packages to control a robot arm to sort blocks based on human gesture feedback and interaction.
C++PythonROS 2MoveItPyTorchOpenCV
Used stereo images to track the position of a camera in real time.
PythonOpenCVVisual OdometryDeep Learning
Programmed a Franka Emika 7DOF robot arm to brew a cup of pour over coffee.
ROS2PythonOpenCVMoveitApril Tags
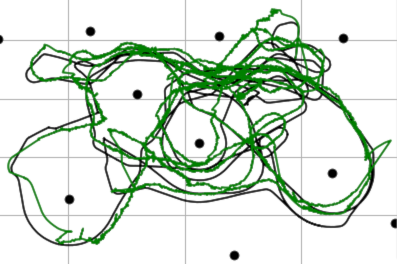
Applied a particle filter to a robot dataset to improve the position estimate of the robot.
Particle FilterPythonLocalization
Simulated a KUKA YouBot picking up and placing a block at user-specified positions.
PythonCoppliasimTrajectory Generation
Created a collection of ROS 2 packages for a turtlebot to create a map, detect and associate obstacles, and localize itself using wheel odometry and lidar scans.
C++ROS 2SLAMExtended Kalman Filter
Created a neural network for detecting obstacles using an RGB camera mounted on a mobile robot.
Deep LearningPyTorchNeural NetworksPath Planning
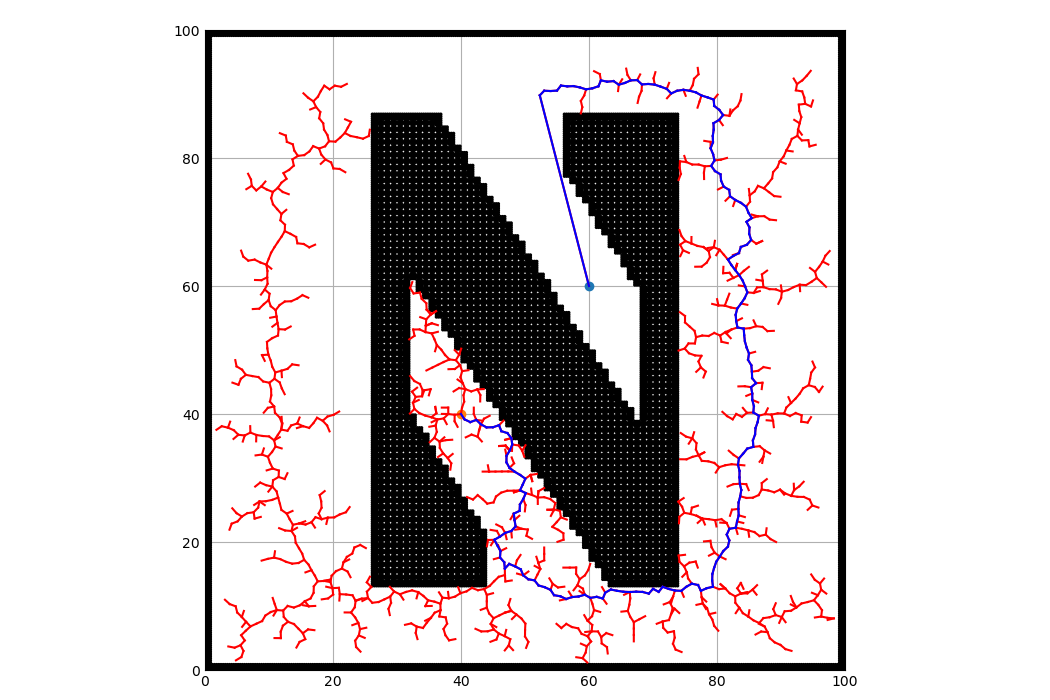
Created a program to find a path between two points points while avoiding obstacles using an RRT.
PythonPath Planning
Simulated a planer multi-body dynamics of a jack in the box with external forces and impacts.
PythonLagrangian DynamicsRigid Body TransformsImpact Physics